

摘要:本毕业设计论文研究了智能车辆系统的设计与研究,特别是基于深度学习的自动驾驶技术。论文提出了可靠的操作策略方案,旨在实现自动驾驶的智能化和安全性。通过深度学习和智能算法的应用,该系统能够在不同道路和环境下实现自主驾驶,提高行驶的安全性和效率。该设计对于未来智能交通系统的开发具有重要意义。
本文目录导读:
随着科技的飞速发展,自动驾驶技术已成为汽车工业和信息技术领域的研究热点,本文旨在探讨基于深度学习的智能车辆系统设计,通过综合运用计算机视觉、自动控制理论、人工智能等技术,实现车辆的自动驾驶功能,本文首先介绍了自动驾驶的背景和意义,接着阐述了系统的总体设计思路,详细描述了关键技术的实现方法,并对实验结果进行了分析和讨论。
自动驾驶技术是一种通过计算机系统和传感器实现车辆自主驾驶的技术,随着人工智能和计算机视觉技术的不断进步,自动驾驶技术已成为汽车工业的重要发展方向,该技术能够极大地提高驾驶安全性,降低人为因素导致的交通事故发生率,并优化交通流量,提高道路使用效率,本文设计了一种基于深度学习的智能车辆系统,旨在实现车辆的自动驾驶功能。
系统总体设计
智能车辆系统主要由感知模块、决策规划模块、控制执行模块和数据处理模块四个部分组成,感知模块通过传感器获取车辆周围环境信息;决策规划模块根据环境信息和车辆状态进行路径规划和决策;控制执行模块根据决策结果对车辆进行操控;数据处理模块负责数据的存储和分析。
关键技术实现
1、感知模块实现
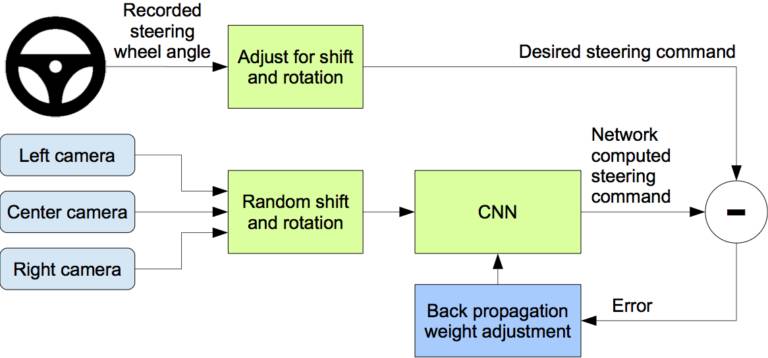
感知模块是智能车辆系统的核心部分之一,主要通过传感器获取车辆周围环境信息,本文采用深度学习技术,通过训练卷积神经网络(CNN)实现对道路、车辆、行人等物体的识别,具体而言,通过摄像头获取道路图像,经过CNN处理后,提取出图像中的特征信息,进而实现对周围环境的感知。
2、决策规划模块实现
决策规划模块根据感知模块获取的环境信息和车辆状态,进行路径规划和决策,本文采用基于深度学习的强化学习方法,通过与环境交互,学习最优的驾驶策略,具体而言,通过构建价值函数和策略函数,使智能车辆在面对不同环境时能够做出正确的决策。
3、控制执行模块实现
控制执行模块根据决策结果对车辆进行操控,本文采用自动控制理论,设计车辆的纵向和横向控制器,纵向控制器通过控制油门和刹车实现车辆的速度控制,横向控制器通过控制转向盘实现车辆的行驶方向控制。
4、数据处理模块实现
数据处理模块负责数据的存储和分析,本文采用分布式存储技术,实现对海量驾驶数据的存储,采用数据挖掘和机器学习技术,对驾驶数据进行分析,优化驾驶策略,提高智能车辆的驾驶性能。
实验结果与分析
为了验证本文设计的智能车辆系统的性能,进行了实验验证,实验结果表明,基于深度学习的感知模块能够准确地识别道路、车辆、行人等物体;基于深度学习的强化学习决策规划方法能够在不同环境下做出正确的驾驶决策;自动控制理论设计的控制器能够实现车辆的精准操控。
本文设计了一种基于深度学习的智能车辆系统,实现了车辆的自动驾驶功能,通过综合运用计算机视觉、自动控制理论、人工智能等技术,实现了对车辆周围环境的感知、路径规划和决策、控制执行和数据处理等功能,实验结果表明,该系统具有良好的性能和稳定性,本文的创新之处在于将深度学习技术应用于智能车辆系统的设计中,提高了系统的智能化程度和自主性。
展望
随着人工智能和计算机视觉技术的不断进步,智能车辆系统将会得到更广泛的应用,未来的研究方向包括:提高系统的感知能力和决策能力,优化控制算法,提高驾驶安全性;加强系统的自适应能力,适应不同的道路和天气条件;降低系统成本,推广智能车辆的应用。
关键词:智能车辆、自动驾驶、深度学习、计算机视觉、自动控制理论。
Summary: This paper introduces the design and research of an intelligent vehicle system based on deep learning and autonomous driving technology. Through the comprehensive application of computer vision, automatic control theory, artificial intelligence and other technologies, the system achieves autonomous driving function. The paper introduces the overall design of the system, describes the implementation of key technologies in detail, analyzes and discusses the experimental results. The innovation of this paper lies in the application of deep learning technology in the design of intelligent vehicle system, which improves the intelligence and autonomy of the system. The future research direction includes improving the perception and decision-making ability of the system, optimizing the control algorithm, improving driving safety, enhancing the adaptive ability of the system to adapt to different roads and weather conditions, and reducing the cost of the system to promote the application of intelligent vehicles.
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...