

摘要:尺蠖机器人是一种基于尺蠖运动原理设计的机器人,其结构简图包括驱动部分、传动部分和行走部分。设计原理主要是通过模拟尺蠖的爬行方式,利用连续的弯曲运动实现机器人的移动。该机器人结构简单,移动灵活,适用于狭小空间的工作场景。
本文目录导读:
尺蠖机器人是一种模拟尺蠖虫运动方式的机器人,其结构独特,运动方式高效,本文旨在介绍尺蠖机器人的结构简图及其设计原理,帮助读者了解尺蠖机器人的基本构造和工作原理。
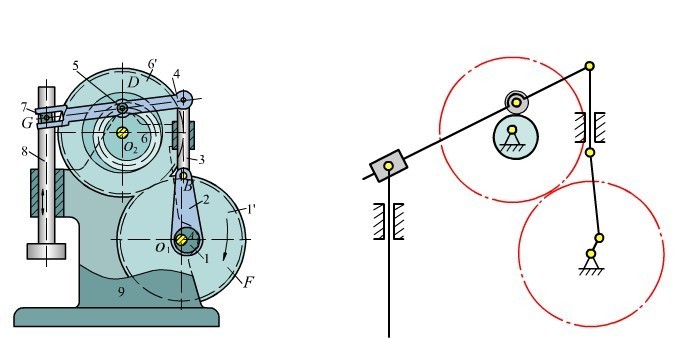
尺蠖机器人结构简图
尺蠖机器人结构主要由以下几部分组成:
1、主体结构:主体结构是尺蠖机器人的核心部分,通常采用轻质、高强度的材料制成,如碳纤维复合材料,主体结构包括机身和连接机构,用于连接其他部件。
2、行走机构:行走机构是尺蠖机器人实现运动的关键部分,通常采用轮式或腿式结构,在尺蠖机器人中,行走机构的设计需要充分考虑其在不同地面条件下的适应性和稳定性。
3、驱动系统:驱动系统负责为尺蠖机器人提供动力,包括电机、减速器、电池等,驱动系统的设计需要满足尺蠖机器人的运动需求,同时要考虑能量效率和可靠性。
4、控制系统:控制系统是尺蠖机器人的“大脑”,负责协调各部件的工作,实现机器人的运动控制、感知和决策等功能。
基于以上组成部分,我们可以绘制出尺蠖机器人的结构简图,在结构简图中,可以清晰地看到各部件的位置和连接方式,以及它们之间的相互作用。
尺蠖机器人设计原理
尺蠖机器人的设计原理主要基于尺蠖虫的运动方式,尺蠖虫是一种爬行昆虫,其运动方式独特,通过交替伸缩身体部位来实现前进,尺蠖机器人的设计旨在模仿尺蠖虫的这种运动方式,以实现更高效、更灵活的移动。

在设计尺蠖机器人时,需要考虑以下几个方面:
1、运动学模型:建立尺蠖机器人的运动学模型,分析其在运动过程中的力学特性和运动规律,这有助于优化机器人的结构设计,提高其运动性能。
2、控制系统设计:根据尺蠖机器人的运动学模型,设计合适的控制系统,实现机器人的运动控制、感知和决策等功能,控制系统需要具有较高的实时性和稳定性,以确保机器人的运动精度和安全性。
3、能量管理:尺蠖机器人在运动过程中需要消耗大量能量,因此需要进行有效的能量管理,这包括选择合适的电源、优化电机的运行效率等,以提高机器人的续航能力和运行效率。
4、适应性设计:尺蠖机器人需要在不同的环境条件下工作,因此需要具有良好的适应性,这包括设计可更换的行走机构、调整机器人的运动模式等,以适应不同地面条件下的工作需求。
尺蠖机器人的应用领域
尺蠖机器人由于其独特的运动方式和高效的运动性能,在许多领域具有广泛的应用前景,在工业生产中,尺蠖机器人可以用于自动化生产线上的物料搬运、装配等任务;在科研领域,尺蠖机器人可以用于探索狭小空间、进行精密测量等任务;在军事领域,尺蠖机器人可以用于执行特种任务、进行侦察和攻击等。
本文介绍了尺蠖机器人的结构简图和设计原理,帮助读者了解了尺蠖机器人的基本构造和工作原理,尺蠖机器人作为一种模拟尺蠖虫运动方式的机器人,具有独特的运动方式和高效的运动性能,在许多领域具有广泛的应用前景,随着技术的不断发展,尺蠖机器人在未来的应用前景将会更加广阔。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...